Postures
When using the gloves, the hand is a piece of hardware or an instrument. One way of using the hand as a control is by teaching Glover different custom postures to use in mappings. Four postures are commonly used as basic postures to begin with:
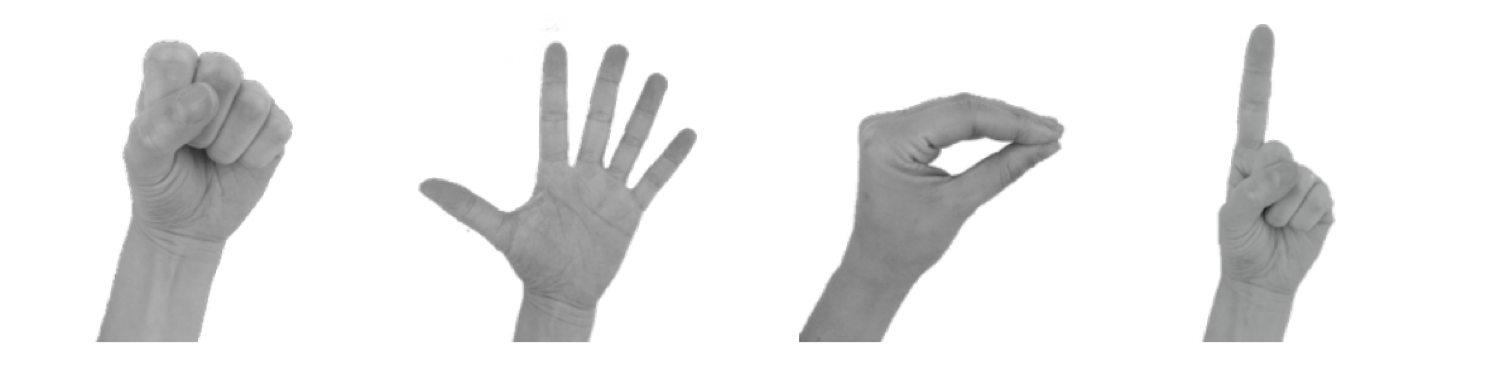
Fist
Pro Tip: Fist tends to be one of the fastest and most reliable postures - use it to map things that require precise timing and are crucial to hit every time.Open Hand
Also just how it sounds. Pro Tip: When making this posture, make sure your proximal knuckles are not bent backwards - this can cause the sensors to buckle and give faulty readings!Puppet Hand
This one is with the fingers straight but bent forward as if you were wearing a sock puppet.One Finger Point
For this one, try to commit to it - that is, bend the bent fingers fairly tightly and make sure the index finger is straight (but not overextended).Useful Tips on Posture Recognition
- The more postures you use simultaneously, the more difficult it is for the algorithm to recognise them. We have allowed up to 9 postures per hand simultaneously as beyond this point the quality of the posture recognition drops. However, keep in mind that it will always be easier to recognise 4 different postures than 9, so don't train unnecessary postures.
- You should train more than one example per posture. Our research has shown that the performance of the posture recognition improves with more training examples per posture. We recommend using about 10 examples per posture.
- Think carefully about the postures you are using - if you find it hard to tell them apart, chances are the algorithm will too!
- Be consistent - for example, if you make a fist, does your thumb go inside your other fingers or outside? Either is fine, but once you've chosen a route, go with it. Consistency = better posture recognition.